
کنترل سرعت و جهت و شتاب موتور DC با توان 480 وات
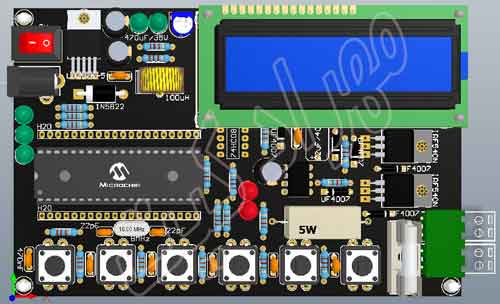
در زیر چند نمونه عکس از کیت درایور موتور DC مشاهده می کنید.




موتور های DC:
ماشین جریان مستقیم وسیلهای الکتریکی است که انرژی جریان مستقیم برق را به انرژی مکانیکی تبدیل میکند.
مدل معمول این نوع موتورها وابسته به نیروی حاصل از میدانهای مغناطیسی است.
اخیراً غالب موتورهای جریان مستقیم (DC) دارای مکانیسم داخلی برای تغییر جهت جریان به صورت دورهای در موتور هستند.
اکثر ماشینهای دی سی حرکت گردشی دارند به جز ماشینهای القایی خطی که نیرو و حرکت خطی و در مسیر مستقیم دارند.
این نوع ماشین به خاطر توانایی تولید گشتاور و راهاندازی بالا و متغیر برای بارهای مورد استفاده کاربرد بسیاری در صنعت دارد. سرعت ماشینهای دی سی توسط روشهای مختلفی قابل کنترل است از جمله تغییر میزان ولتاژ تغذیه کننده یا تغییر میزان جریانی که در سیم پیچهای ماشین جاری میشوند به وسیله ی پالس ها (PWM).
ماشینهای دی سی در سایز کوچک در ابزارآلات، اسباب بازیها و تجهیزات زیادی مورد استفاده قرار میگیرد.
موتور های DC در ابعاد بزرگتر در آسانسورها، وسائل نقلیه، بالابرها و حتی در بعضی آسیابها استفاده میشوند.
به دلیل پیشرفتهای چشمگیر الکترونیک قدرت امروزه این نوع ماشینها میتوانند جایگزین اغلب موتورهای جریان متناوب (AC) شوند. همچنین این نوع ماشین در کاربردهای صنعتی که کنترل دقیق سرعت و گشتاور مورد نیاز است، استفادههای فراوان دارد.
درایو موتور های DC:
مقدمه:
امروزه در صنعت و در بسیاری از وسایل خانگی کنترل دور موتور مورد استفاده میگردد. از جمله می توان به کاربردهای کنترل گرهای دور موتور، به موارد زیر اشاره کرد:
1) وسایل خانگی:
کنترل گرهای دور موتور در وسایل شخصی خانگی، در کاربردهای کوچک و بزرگ مورد استفاده قرار می گیرند. به عنوان مثال، پنکه های دیواری یا پنکه تهویه حمام که توسط کلیدی کنترل می شوند.
2) در وسایل اداری و درمانی:
در این دسته دستگاه های بسیاری را می توان مثال زد. مداد تراش های برقی در ادارات، دستگاه هایفکس، کامپیوترها یا دستگاه های کپی و … سیستم کاری این کنترل گرها بسیار پیچیده بوده و حتی در مورد وسایل درمانی پیچیده تر نیز می شود. مثلاً کنترل دور موتور داخل هاردیسک کامپیوتر را در نظر بگیرید.
3) در کاربردهای تجاری:
ساختمان های تجاری دارای سیستم تهویه بزرگتر و مجهزتری نسبت به موارد مشابه در منازل شخصی دارند. همچنین می توان در این دسته موتورها برای آسانسورها، پله های برقی و موارد مشابه را نام برد.
4) کاربردهای صنعتی:
بسیاری از صنایع وابسته به موتورها و کنترل دور موتور آن ها می باشند. موتورهای کوچک DC تا موتورهای بزرگ صنعتی، یا موتورهای استفاده شده در خطوط مترو همچنین در صنعت ممکن است یک کنترل گر عمل کنترل بیش از یک موتور را به طور همزمان برعهده داشته باشد.
5) در وسایل نقلیه:
تمام وسایل نقلیه از جمله، خودروها، هواپیماها،دستگاه آلات کشاورزی، همه و همه ممکن است دارای موتور برای انجام کارهای گوناگونی باشند.
6) ابزار قدرت:
وسایل قدرتی همانند دریل ها، اره ها، چرخ سمباده ها که توسط کاربر خانگی استفاده می شوند. تمام وسایل قدرتی قابل حمل یا ثابت دارای معمولاً همراه با کنترل گرهای سرعت این موتورها نیز می باشند.
همان طور که می دانیم برای کنترل سرعت موتور های DC سه روش وجود دارد.
1- کنترل ولتاژ آرمیچر 2- کنترل شار میدان 3- کنترل مقاومت آرمیچر. روش کنترل مقاومت آرمیچر بدلیل داشتن تلفات اضافی، دیگر کاربردی ندارد و با توجه به پیشرفت تکنولوژی الکترونیک قدرت روش های اول و دوم بیشتر کاربرد دارند.
برای کنترل سرعت و جهت موتورهای DC نیاز به یک مدار Full Bridge یا پل H می باشد. در شکل زیر نمای یک مدار پل برای کنترل موتور DC را مشاهده می کنید.
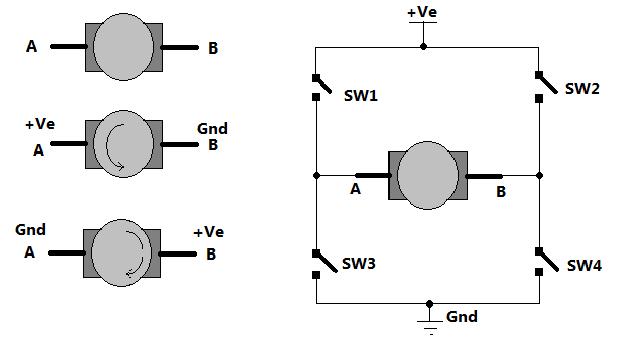
در شکل زیر پیاده سازی پل H توسط مدارات ترانزیستوری را مشاهده می کنید.
در این کیت با استفاده از میکروکنترلر یک سیگنال PWM تولید می شود. برای کنترل سرعت در موتور های DC باید مقدار دیوتی سایکل سیگنال PWM را کنترل نمود.
همچنین برای کنترل جهت در موتور های DC جهت پل در مدار عوض می شود. سیگنال تولید شده توسط میکروکنترلر ابتدا تقویت می شود، سپس از طریق طبقه قدرت به بار انتقال پیدا می کند.
در این مدار تشخیص اضافه بار و اتصال کوتاه خروجی نیز، پیش بینی شده است. در مواقعی که بار جریانی، بیشتر از جریان مجاز تعریف شده، مصرف کند، میکروکنترلر سیگنال PWM را قطع می کند و پل را به حالت ترمز می برد.
توان طبقه قدرت ماکزیمم تا 480 وات بوده و برای بارهایی با توان کمتر از این نیز مدار کار می کند. در زیر یک نمونه پل H برای کنترل سرعت و جهت و شتاب موتور DC مشاهده می کنید.
نحوه عملکرد کیت:
پس از فراهم شدن تغذیه برای سخت افزار ها، میکروکنترلر تمامی سخت افزار های برد آموزشی را راه اندازی اولیه و یا Initializing می کند.
سپس میکروکنترلر بروی LCD اطلاعات مهم را برای کاربر نمایش می دهد. در این کیت برای کنترل بهتر موتور DC از پل ماسفت استفاده شده است.
سپس میکروکنترلر حالت اولیه پل را در حالت ترمز قرار می دهد، تا موتور هیچ گونه حرکتی نداشته باشد.
کاربر از طریق پوش باتن های موجود بر روی برد می تواند مقدار دیوتی سایکل سیگنال PWM اعمال شده به موتور را کنترل کند که در نتیجه دامنه خروجی ولتاژ و در نتیجه سرعت موتور را کنترل کند.
کاربر می تواند جهت و شتاب موتور را به طور پیوسته کنترل کند.
کاربر به طور همزمان می تواند از طریق پورت سریال کامپیوتر و یک نرم افزار واسط گرافیکی که توسط C# نوشته شده است و نمای آن را در عکس های فوق مشاهده نموده اید، موتور را کنترل کند.
و این کنترل شامل انتخاب جهت و سرعت و استارت-استاپ کردن موتور می باشد. همچنین کاربر می تواند برای اطلاع کامل از سرعت موتور با استفاده از یک انکودر سرعت فعلی موتور را تشخیص دهد.
در این کیت تشخیص اضافه بار جریان موتور نیز پیش بینی شده است. به طور پیش فرض یک مقدار اولیه به عنوان ماکزیمم جریانی که موتور از منبع دریافت می کند در میکروکنترلر ست شده است.
اگر به هر دلیل جریان موتور از این مقدار پیش فرض تجاوز کند میکروکنترلر پل را در حالت ترمز قرار می دهد و مانع از آسیب دیدن موتور می شود.
قابلیت های کیت:
- کنترل سرعت ، شتاب ، جهت موتور های DC
- تشخیص اضافه بار موتور
- تشخیص اتصال کوتاه خروجی
- تشخیص دمای سوئیچ های قدرت
توضیحات:
- به زودی فایل های مربوط به این پروژه آپلود میشود.

سلام جناب مهندس
بفرمایید این کیت میتواند 3 موتور 12v dc راجداگانه کنترل کند ؟ یعنی با فشار دکمه ریموت 1 ثانیه راستگرد کار کند و خاموش شود و دوباره با فشار همان کلید ریموت موتور 1 ثانیه چپگرد کار کرده خاموش شود . درست مانند درب ماشین یا درب پارکینگ برا بازوهای یه ربات میخام لطفا راهنمایم کنید .اگه این کیت جواب میدهد بفرمایید قیمتشو و طریقه سفارشو و اگه خوب نیست از چی استفاده کنم. با تشکر
با سلام و تشکر از شما کاربر گرامی.
دقیقا چنین بردی توی فروشگاه سایت موجود داریم.
با سلام اسم این کیت رو بگین و چند امپر رو میشه ازش کشید
منم یک موتور dc۱۲ ولت رو میخوام چپ گرد و راستگردوحید کنم با ریموت کنترل
این دستگاه یک درایو موتور هستش
سلام من یک را دیو کنترل. رادیو لینک دارم می خواهم با این رادیو سه عدد موتور دی سی را که به ماشین کنترلی وصل هست را کنترل کنم خروجی رادیوکنترل پالس هست شما برد رابطی دارین که بین رسیور رادیو و موتور قرار گیرد. وموتور را ه اندازی کند
با سلام.
مدل رادیویی درایو موتور دی سی هم داریم.
سلام وقت شما بخیر من میخوام یک موتور DC 100 ولت رو کنترل کنم هم از نظر جهت چرخش و هم سرعت دارید چنین بورد کنترلی و قیمت چند هست اگر ممکنه اعلام بفرمایید متشکرم
با سلام
هزینه ساخت یک درایو ۷۵۰ وات برای موتور براش ۲۲۰ ولت دی سی با امکان تغییر دور صفر تا صد با گشتاور نسبتآ ثابت و تغییر دور توسط پتانسیومتر و کلید چپگرا راستگرد با امکانات حفاظتی مدار چقدر میشه .
با تشکر از پاسخگویی شما.
با سلام خدمت شما همکار گرامی به آدرس ایمیل شما پاسخ خواهیم داد.
سلام از یونیت شما برای موتور ۲ اسب تک فاز میشه استفاده کرد برای کنترل سرعت در دستگاه خراطی
با عرض سلام
میخواستم بدانم آیا این کنترل دور آرمیچر به در دستگاه مینی تراش که آن هم 450 وات هست میخورد یانه .
ممنون میشم راهنمایی فرمایید
با سلام خدمت شما همکار گرامی خیر.
موتور های مینی تراش معمولا موتور تکفاز القایی هستند.
این درایو برای موتور های DC می باشد.
سلام
مدار کنترل دور با فیدیک انجام میشه؟ مثلا ما ست پوینت دور رو بزاریم 200 دور در دقیقه و موتور بدون اینکه چه باری روش هست بتونه با دور 200 کار کنه.
و موتور توانایی کنترل دور موتور 12 ولت فن ماشین ال 90 رو که حدود 4 امپر میکشه رو داره که به صورت مداوم بتونه 2 ماه کار کنه؟